Główne Wyzwanie: Defekty Bez Cienia
Podstawowym problemem w systemie kontroli jakości była detekcja małych dziur na płaskiej powierzchni. Kluczowe uwarunkowania, które czyniły to zadanie wyjątkowo trudnym, to:
- Charakter defektu: Dziury miały ten sam kolor i teksturę co materiał bazowy, co wykluczało prostą analizę koloru lub wzoru.
- Oświetlenie otoczenia: Hala produkcyjna, z licznymi świetlikami dachowymi i bocznymi, była zalana mocnym, ale ekstremalnie rozproszonym światłem. Taki typ oświetlenia jest pożądany dla bezpieczeństwa pracy, ale dla systemów wizyjnych jest zabójczy – eliminuje praktycznie wszystkie cienie.
Bez cieni, wgłębienia stają się optycznie "płaskie" i niemożliwe do odróżnienia od reszty powierzchni.
Pierwsze Podejście i Jego Porażka: Standardowa Kamera Przemysłowa
Pierwszą hipotezą było zastosowanie standardowej kamery przemysłowej o wysokiej rozdzielczości, skierowanej na linię produkcyjną.
Wynik: Całkowite niepowodzenie. Obraz rejestrowany przez kamerę nie wykazywał żadnych śladów defektów.
Analiza porażki: Problem nie leżał w rozdzielczości kamery, ale w fizyce oświetlenia. Brak cieni na obrazie oznaczał brak informacji o głębi. Wniosek był jednoznaczny: musimy przejąć kontrolę nad oświetleniem i aktywnie generować cienie.
Ocena Alternatywnych Architektur Oświetlenia
Rozważono trzy konkurencyjne strategie oświetleniowe:
Podejście #1: Oświetlacz Liniowy Ustawiony Równolegle
- Koncepcja: Użyć jednej, długiej lampy liniowej, ustawionej pod kątem wzdłuż linii produkcyjnej.
- Problem: Nierównomierność oświetlenia. Intensywność światła drastycznie spada wraz z odległością.
Werdykt: Odrzucone.
Podejście #2: Skanowanie Liniowe z Użyciem Lampy LED
- Koncepcja: Zmienić architekturę na "linia po linii". Lampa liniowa jest ustawiona prostopadle do ruchu produktu. Do akwizycji wykorzystuje się kamerę liniową.
- Zalety: Rozwiązuje problem równomierności oświetlenia.
- Wady:
- Złożoność mechaniczna – wymaga aktywnego systemu pozycjonowania lampy
- Wysoki pobór mocy
Werdykt: Technicznie wykonalne, ale skomplikowane i kosztowne w eksploatacji.
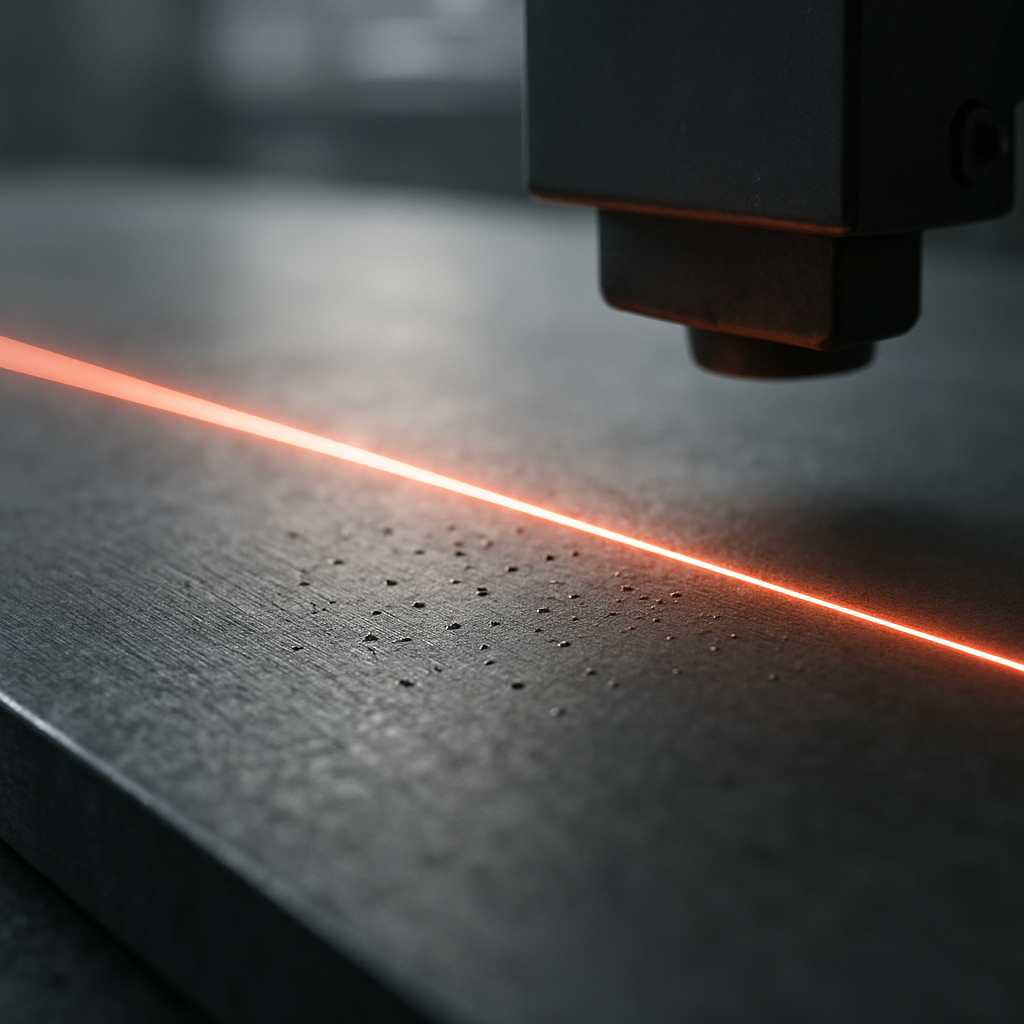
Podejście #3: Skanowanie Liniowe z Użyciem Lasera
- Koncepcja: Identyczna architektura jak w podejściu #2, ale źródłem światła jest laser liniowy.
- Zalety:
- Brak elementów ruchomych – laser może być umieszczony w dużej odległości
- Ekstremalnie niski pobór mocy
Werdykt: Zwycięzca.
Decyzja i Dalsze Kroki
Wybrano podejście oparte na skanowaniu laserowym, ponieważ oferuje ono najbardziej niezawodną i efektywną kosztowo architekturę. Eliminacja części ruchomych bezpośrednio przekłada się na niższy całkowity koszt maszyny i jej wyższą dostępność operacyjną.
W kolejnych częściach serii zagłębi się w szczegóły implementacyjne:
- Dobór parametrów lasera
- Analiza sygnatury linii lasera na defektach
- Strategie przetwarzania obrazu i budowa algorytmów